Phelm
- Phelm Documentation (HTML, Doxygen)
- Phelm Reference Manual (PDF, 849 Кб)
- Хранилище с исходным кодом на Bitbucket
- Лицензия
- Примеры
- Благодарности
Библиотека Phelm предназначена для решения уравнений в частных производных на двумерных многообразиях.
Для решения этой задачи вам потребуется:
- построить триангуляцию многообразия;
- разбить многообразие на области;
- задать в каждой области локальную систему координат;
- задать функцию вычисления поверхностного интеграла в локальных координатах.
Дистрибутив библиотеки уже содержит построители сеток для сферических поверхностей и плоских прямоугольных областей.
Скачать phelm-1.0.1.tar.bz2 (141 Кб)
Примеры
Рассмотрим два основных аспекта работы с библиотекой: работу с неплоскими областями и с системами уравнений.
Кроме описанных ниже, в дистрибутиве библиотеки содержатся следующие примеры:
- уравнение Лапласа на плоскости;
- уравнение Чафе-Инфанта на плоскости;
- уравнение Чафе-Инфанта на сфере;
- уравнение баротропного вихря на сфере;
- двуслойная бароклинная модель атмосферы на сфере.
Уравнение Лапласа на сфере
Данный пример показывает как работать с неплоскими областями. Рассмотрим уравнение:
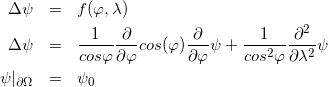
Суть метода конечных элементов состоит в том, что исходная область делится на треугольники, не имеющие общих внутренних точек. Далее, на области определяется набор базисных функций, а искомая функция ищется в виде суммы:
![]()
Базисные функции (φi) берут таким образом, чтобы их носитель содержал как можно меньше треугольников.
Пока библиотека Phelm поддерживает только линейные базисные функции, которые принимают значение единицы в единственном узле сетки, а в остальных узлах функция равна нулю.
Умножим скалярно уравнение на все базисные функции (их ровно столько, сколько узлов сетки):
![]()
В итоге, получим систему уравнений на значения искомой функции во внутренних узлах сетки.
Заметим, что в уравнение входят скалярные произведения между производными базисных функций (в левой части уравнения) и базисными функциями (в правой части уравнения). Соответственно, для создании матрицы системы линейных уравнений и правой части их надо посчитать.
Матрица системы линейных уравнений создается с помощью функции generate_matrix, а правая часть — с помощью функции generate_right_part. Обе функции принимают в качестве аргумента callback, который будет считать скалярные произведения между базисными функциями.
Для создания матрицы линейной системы callback будет выглядеть так:
/*
* phi = x - latitude
* lambda = y - longitude
*/
/*
* laplace = laplace1 + laplace2
*/
/*
* laplace1 = (1 / cos phi d / d phi phi_i, cos phi d / phi phi_j)
*/
static double laplace1(const Polynom & phi_i, const Polynom & phi_j,
const Triangle & trk, const Mesh::points_t & ps)
{
return integrate_cos(diff(phi_i, 0) * diff(phi_j, 0), trk, ps);
}
/*
* laplace2 = (1 / cos phi d / d lambda phi_i, 1 / cos phi d / d lambda phi_j)
*/
static double laplace2(const Polynom & phi_i, const Polynom & phi_j,
const Triangle & trk, const Mesh::points_t & ps)
{
return integrate_1_cos(diff(phi_i, 1) * diff(phi_j, 1), trk, ps);
}
double slaplace(const Polynom & phi_i, const Polynom & phi_j,
const Triangle & trk, const Mesh::points_t & ps)
{
return -(laplace1(phi_i, phi_j, trk, ps) + laplace2(phi_i, phi_j, trk, ps));
}
static double
slaplace_integrate_cb(const Polynom & phi_i,
const Polynom & phi_j,
const Triangle & trk,
const Mesh & m,
int point_i,
int point_j,
int, int,
void * user_data)
{
return slaplace(phi_i, phi_j, trk, m.ps);
}А для создания вектора правой части — так:
struct slaplace_right_part_cb_data
{
const double * F;
const double * bnd;
};
static double
slaplace_right_part_cb(const Polynom & phi_i,
const Polynom & phi_j,
const Triangle & trk,
const Mesh & m,
int point_i,
int point_j,
int, int,
slaplace_right_part_cb_data * d)
{
const double * F = d->F;
double b = 0.0;
if (m.ps_flags[point_j] == 1) { // на границе
int j0 = m.p2io[point_j]; // номер внешней точки
const double * bnd = d->bnd;
b += - bnd[j0] * laplace(phi_i, phi_j, trk, m.ps);
} else {
b += F[point_j] * integrate_cos(phi_i * phi_j, trk, m.ps);
}
return b;
}В callback учтено то, что искомая функция известна на границе, поэтому часть скалярных произведений попадает в правую часть.
Решение системы уравнений:
Matrix laplace;
Mesh m;
[...]
generate_matrix(laplace, m, slaplace_integrate_cb, (void*)0);
slaplace_right_part_cb_data d;
d.F = F;
d.bnd = boundary;
generate_right_part(&b[0], m_, (right_part_cb_t)(slaplace_right_part_cb), (void*)&d);
phelm::solve(answer, boundary, &b[0], laplace, m);Полный пример смотрите в файле test_slaplace.cpp
А в чем же состоит работа с неплоской областью? Во-первых, заметим, что пользователь должен определить функцию вычисления поверхностного интеграла по треугольнику. Для сферы это уже выполнено в функции integrate_cos. Во-вторых, заметим, что уравнение на сфере имеет 3 особенности:
- особые точки на полюсах, в которых
cosобращается в ноль; - циклическая координата
lambda; - система уравнений вырождена в случае полной сферы.
Последняя проблема решается заданием краевого условия в единственной точке, например, в южном полюсе. Первые две проблемы можно решать разными способами.
Подразумевается, что вы разбиваете свое многообразие на области без особенностей. Сферу, например, можно разбить на 4 области со своей системой координат в каждой:

В этом случае, особых точек и циклических координат не будет.
Разбиение сферы осуществляется утилитой sphere, которая входит в дистрибутив Phelm. Использовать ее следует так:
sphere --coord local --type full --iter N > file.txtЧем больше N, тем мельче сетка. Получившийся файл можно потом загрузить в память с помощью функции Mesh::load.
В таблице ниже представлена зависимость погрешности решения данной задачи в зависимости от размера сетки. При уменьшении шага в два раза погрешность сокращается примерно в четыре раза:
| It | Число точек | Погрешность |
|---|---|---|
| 1 | 41 | 3.03 × 10+0 |
| 2 | 161 | 6.92 × 10-1 |
| 3 | 641 | 1.39 × 10-1 |
| 4 | 2561 | 3.41 × 10-2 |
| 5 | 10241 | 7.92 × 10-3 |
| 6 | 40961 | 2.08 × 10-3 |
| 7 | 163841 | 5.87 × 10-4 |
Сдвоенные уравнения Лапласа в прямоугольнике
Данный пример показывает как работать с системами уравнений. Рассмотрим систему уравнений:
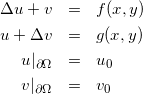
Как и в первом случае, функции u и v будем искать в виде суммы. Умножим оба уравнения системы скалярно на базисные функции и составим систему уравнений.
Пусть триангуляция, на которой решаем уравнение, состоит из N внутренних точек. Тогда размерность матрицы системы будет 2N × 2N, а размерность вектора — 2N. При этом, первые N строк матрицы относятся к первому уравнению системы, а следующие N строк — ко второму; первые N столбцов матрицы относятся к функции u, следующие N столбцов — к функции v. Аналогично с вектором правой части: первые N элементов вектора правой части относятся к первому уравнению, а следующие N элементов — ко второму.
Функции generate_matrix и generate_right_part обходят в цикле все пересекающиеся базисные функции один раз, поэтому при обходе элементов i и j надо «сказать» генераторам, что мы хотим изменить не только элемент (i, j) матрицы или элемент (i) вектора правой части, а еще и элементы (i+N, j), (i, j+N), (i+N, j+N) матрицы и элемент (i+N) вектора правой части. Для этого используются callback, которые возвращают контейнер элементов.
Создание матрицы системы:
static elements_t
laplace_integrate_cb( const Polynom & phi_i,
const Polynom & phi_j,
const Triangle & trk,
const Mesh & m,
int point_i, int point_j,
int i, int j,
void * user_data)
{
int rs = (int)m.inner.size();
elements_t r;
double a;
a = laplace(phi_i, phi_j, trk, m.ps);
// Delta u
r.push_back(Element(i, j, a));
// Delta v
r.push_back(Element(i + rs, j + rs, a));
a = integrate(phi_i * phi_j, trk, m.ps);
// v
r.push_back(Element(i, j + rs, a));
// u
r.push_back(Element(i + rs, j, a));
return r;
}Здесь rs — это размерность матрицы.
Создание правой части:
struct laplace_right_part_cb_data
{
double * F;
double * G;
double * BU;
double * BV;
};
static elements_t
laplace_right_part_cb( const Polynom & phi_i,
const Polynom & phi_j,
const Triangle & trk,
const Mesh & m,
int point_i, int point_j,
int i, int j,
laplace_right_part_cb_data * d)
{
int rs = (int)m.inner.size();
elements_t r;
const double * F = d->F;
const double * G = d->G;
if (m.ps_flags[point_j] == 1) {
int j0 = m.p2io[point_j];
const double * BU = d->BU;
const double * BV = d->BV;
double a = laplace(phi_i, phi_j, trk, m.ps);
double b = integrate(phi_i * phi_j, trk, m.ps);
r.push_back(Element(i, j, -(BU[j0] * a + BV[j0] * b)));
r.push_back(Element(i + rs, j, -(BV[j0] * a + BU[j0] * b)));
} else {
double a = integrate(phi_i * phi_j, trk, m.ps);
// F
r.push_back(Element(i, j, F[point_j] * a));
// G
r.push_back(Element(i + rs, j, G[point_j] * a));
}
return r;
}Отметим, что параметр j в данном случае не используется, и вместо него можно подставить все, что угодно.